روش های کنترل دور موتور DC
آشنایی با کنترل دور موتور های DC
موتور DC بسیار انعطاف پذیر است و در صنایع کاربرد وسیعی دارد. با اتصالات مختلف سیم پیچ میدان می توان در این موتورها به مشخصه های گوناگون گشتاور، سرعت و ولتاژ جریان دست یافت.امروزه موتورهای DC هنوز در سیستم های حمل و نقل (مترو) حرف اول را می زنند. موتورهای DC کوچک در سیستم های کنترل به وفور یافت می شوند.
موتور DC چیست؟
موتورهای DC هم مشابه انواع دیگر ماشین های گردان، یک استاتور و یک روتور دارند. شکل زیر قسمت های اصلی یک موتور DC را نشان می دهد. معمولاً استاتور از یک سیم بندی میدانی تشکیل می شود که به دور قطب های استاتور در درون یوک استوانه ای شکلی که خود در درون یک قالب فلزی قرار دارد پیچیده شده است. یوک و قطب ها معمولاً از ورق های فولادی با ضخامت ۰٫۵ تا یک میلیمتر ساخته می شوند و در طرف فاصله هوایی، برای شکل دهی مناسب توزیع شار مغناطیسی در فاصله هوایی از کشک قطب استفاده شده است.

بخش های اصلی روتور عبارتند از :
- سیم بندی آرمیچر
- هسته آرمیچر
- کموتاتور مکانیکی
- شفت روتور
کموتاتور چیست؟
کموتاتور قطعه ای رسانا و به صورت حلقه استوانه ای دارای شکاف است که به آرمیچر متصل می شود؛ در واقع هر قسمت از حلقه به انتهای هر یک از سیم پیچ های آرمیچر متصل می شود. کموتاتور وظیفه سوئیچینگ جریان در سیم پیچی آرمیچر به منظور ایجاد گشتاور را بر عهده دارد.
دو ﺳﺮ ﻛﻼف ﻫﺎ ﺑﻪ ﻗﻄﻌﺎت ﻣﺴﻲ ﻛﻤﻮﺗﺎﺗﻮر ﻟﺤﻴﻢ ﻣﻲ ﺷﻮﻧﺪ. ﻗﻄﻌﺎت ﻛﻤﻮﺗﺎﺗﻮر ﻛﻪ از ﻫﻤﺪﻳﮕﺮ و از ﺷﻔﺖ ﻋﺎﻳﻖ ﺷﺪه اﻧﺪ ﺳﻄﺢ ﺧﺎرﺟﻲ آن ها اﺳﺘﻮاﻧﻪ ای ﺷﻜﻞ است ﻛﻪ ﺟﺎروﺑﻚ ﻫﺎ ﺑﺮ روی آن ﺣﺮﻛﺖ ﻣﻲ ﻛﻨﻨﺪ. ﻣﺠﻤﻮﻋﻪ ﺟﺎروﺑﻚ ﻫﺎ و ﻛﻤﻮﺗﺎﺗﻮر ﻧﻪ ﺗﻨﻬﺎ ﺑﻪ ﻣﻨﺰﻟﻪ اﺗﺼﺎل ﮔﺮدان ﺑﻴﻦ دو ﺳﺮ ﻛﻼف ﻫﺎ ﺑﺎ ﭘﺎﻳﺎﻧﻪ ﻫﺎی ﻣﺎﺷﻴﻦ ﻋﻤﻞ ﻣﻲ ﻛﻨﻨﺪ ﺑﻠﻜﻪ ﺳﺒﺐ ﻣﻲ ﺷﻮﻧﺪ ﺑﺎ اﻳﻨﻜﻪ وﻟﺘﺎژ اﻟﻘﺎﻳﻲ در ﻛﻼف ﻫﺎ ﻣﺘﻨﺎوب است، ﺟﺮﻳﺎن در ﻣﺪار ﺧﺎرﺟﻲ ﻳﻚ ﺟﻬﺖ ﺑﺎﺷﺪ. ﺟﺎروبک ﻫﺎ ﻣﻌﻤﻮﻻ در ﻣﻮﻗﻌﻴﺖ ﺧﻨﺜﻲ ﺟﺎی ﻣﻲ ﮔﻴﺮﻧﺪ، ﻳﻌﻨﻲ ﺑﻪ ﻛﻼف ﻫﺎﻳﻲ ﻛﻪ وﻟﺘﺎژ اﻟﻘﺎﻳﻲ در آﻧﻬﺎ ﺻﻔﺮ است متصل می شوند.

کموتاسیون
ﺑﺎ ﮔﺮدش آرﻣﻴﭽﺮ ﻛﻼف ﻫﺎی ﺳﻴﻢ ﺑﻨﺪی آرﻣﻴﭽﺮ در ﻣﻜﺎن ﻫﺎی ﺟﺪﻳﺪ ﺑﺎ ﻣﺴﻴﺮﻫﺎی ﺟﺮﻳﺎن ﻣﺘﻔﺎوت ﻗﺮار ﻣﻲﮔﻴﺮﻧﺪ. ﺟﻬﺖ ﺟﺮﻳﺎن در اﻳﻦ ﻛﻼف ﻫﺎ در ﮔﺬر از ﻳﻚ ﻣﺴﻴﺮ ﺟﺮﻳﺎن ﺑﻪ ﻣﺴﻴﺮ دﻳﮕﺮ ﻣﻲ ﺑﺎﻳﺴﺖ ﻣﻌﻜﻮس ﮔﺮدد. اﻳﻦ ﻓﺮآﻳﻨﺪ ﺑﻪ ﻋﻨﻮان ﻛﻤﻮﺗﺎﺳﻴﻮن ﺷﻨﺎﺧﺘﻪ ﻣﻲ ﺷﻮد. ﻛﻤﻮﺗﺎﺳﻴﻮن ﺟﺮﻳﺎن ﻳک ﻛﻼف وﻗﺘﻲ رخ ﻣﻲدﻫﺪ ﻛﻪ ﻗﻄﻌﺎت ﻛﻤﻮﺗﺎﺗﻮر ﻣﺮﺑﻮط ﺑﻪ آن ﻛﻼف از زﻳﺮ ﻳﻚ ﺟﺎروﺑﻚ ﻋﺒﻮر ﻛﺮده و ﻛﻼف ﺗﻮﺳﻂ آن اﺗﺼﺎل ﻛﻮﺗﺎه ﮔﺮدد.
طی کموتاسیون، رفتار جریان کلاف، متأثر از چندین عامل است از جمله تغییر مقاومت اتصال جاروبک، emf مربوط به اندوکتانس های خودی و متقابل که با تغییر جریان مخالفت می کند و emf مربوط به عکس العمل آرمیچر در حالت ایده آل وقتی روتور با سرعت ثابت می گردد. اگر جریان کلاف با یک نرخ ثابتی تغییر کند چگالی جریان در زیر جاروبک طی فرآیند کموتاسیون یکنواخت خواهد ماند.
انواع موتور DC
 موتور DC دارای جاروبک (Brushed Motor)
موتور DC دارای جاروبک (Brushed Motor)
موتورهایی هستند که میدان مغناطیسی تولیدی در رتور سم پیچی از طریق عبور جریان از کموتاتور و جاروبک به دست می آید.
موتور DC براشلس (BLDC (Brushless DC
در این نوع موتورها از هیچ گونه جاروبک برای کموتاسیون استفاده نمی شود. موتورهای BLDC یک نوع موتور سنکرون محسوب می شوند. زیرا میدان مغناطیسی تولیدی استاتور و میدان مغناطیسی رتور در یک فرکانس عمل می کنند. در این نوع موتورها هیچ گونه لغزشی وجود ندارد.
در استاتورز موتورهای BLDC از سنسور اثر هال به منظور تولید میدان دوار استاتور بهره گرفته می شود. به همین دلیل از نظر قیمت گران تر هستند. عمل کموتاسیون در موتورهای براشلس به صورت الکتریکی انجام می شود.
مزایای موتورهای Brushless DC
موتورهای BLDC نسبت به موتورهای ذغالی (دارای جاروبک) و موتورهای القایی دارای مزایای زیر هستند:
- سرعت بهتر در برابر گشتاور مشخص
- پاسخ دینامیکی بهتر
- راندمان بالاتر
- رنج سرعت گسترده تر
سروو موتور
سروو موتورها، موتورهای DC جاروبک داری هستند که در کاربردهای حلقه بسته با بهره گیری از کنترل فیدبک موقعیت، متصل به شفت رتور، به کار گرفته می شوند. کنترل دور موتور DC سروو به روش PWM (مدولاسیون پهنای پالس) صورت می گیرد.
ﻫﺴﺘﻪ آرﻣﻴﭽﺮ ﻣﺘﺸﻜﻞ از ورق ﻫﺎی ﻓﻮﻻدی داﻳﺮه ای ﺷﻜﻞ اﺳﺖ ﻛﻪ در ﻣﺤﻴﻂ ﺑﻴﺮوﻧﻲ آن ﺗﻌﺪادی ﺷﻴﺎر ﺑﺮای ﺟﺎﻳ ﮕﺬاری ﺳﻴﻢ ﺑﻨﺪی آرﻣﻴﭽﺮ اﺳﺘﻔﺎده ﺷﺪه اﺳﺖ. ﺑﺎزوﻫﺎی ﻛﻼف ﻫﺎی ﺳﻴﻢ ﺑﻨﺪی آرﻣﻴﭽﺮ ﺑﻪ ﺻﻮرت ﻳﻜﻨﻮاﺧﺖ در ﺷﻴﺎرﻫﺎی ﻫﺴﺘﻪ آرﻣﻴﭽﺮ ﺗﻮزﻳﻊ ﺷﺪه اﻧﺪ. آﻧﻬﺎ ﺑﺎ اﺳﺘﻔﺎده از ﻋﺎﻳﻖ ﺷﻴﺎر ﻧﺴﺒﺖ ﺑﻪ روﺗﻮر ﻋﺎﻳﻖ و ﺑﺎ اﺳﺘﻔﺎده از ﺷﻴﺎرﺑﻨﺪ در ﺟﺎی ﺧﻮد ﻣﺤﻜﻢ ﻣﻲ ﺷﻮﻧﺪ.
مدهای عملکرد ماشین الکتریکی
از نظر جریان انرژی، ماشینی که کار می کند نه فقط دارای ورودی و خروجی انرژی است بلکه قابلیت ذخیره انرژی مغناطیسی در میدان و همچنین انرژی جنبشی به شکل چرخشی را دارد. بر اساس جهت جریان انرژی دو مد عملکرد را می توان تشخیص داد.
وقتی انرژی از منبع الکتریکی خارجی متصل به پایانه های ماشین، کشیده شده و تبدیل به کار مکانیکی یا سبب افزایش انرژی جنبشی روتور گردد، عملکرد موتوری را خواهیم داشت و اگر انرژی محرک مکانیکی که روتور را به گردش در می آورد به انرژی الکتریکی تبدیل شده و از طریق پایانه های ماشین به مدار خارجی جریان یابد، عملکرد ژنراتوری را خواهیم داشت.
سیم بندی آرمیچر موتور DC
ﺳﻴﻢ ﺑﻨﺪی ﺣﻠﻘﻮی و ﻣﻮﺟﻲ، دو ﻧﺤﻮه ﺳﻴﻢ ﺑﻨﺪی ﺑﺮای آرﻣﻴﭽﺮ در موتورهای DC است در ﺳﻴﻢ ﺑﻨﺪی ﺣﻠﻘﻮی دو ﺳﺮ ﻫﺮ ﻛﻼف ﺑﻪ دو ﻗﻄﻌﻪ ﻛﻤﻮﺗﺎﺗﻮر ﻣﺠﺎور ﻫﻢ ﻣﺘﺼﻞ ﻣﻲ ﮔﺮدﻧﺪ. ﺑﺮای ﻣﺜﺎل در ﻳﻚ ﺳﻴﻢ ﺑﻨﺪی ﺣﻠﻘﻮی ﺳﺎده ﻓﻘﻂ ﻳﻚ ﺣﻠﻘﻪ ﺑﻪ ﻫﺮ دو ﻗﻄﻌﻪ ﻣﺠﺎور ﻫﻢ ﻣﺘﺼﻞ ﺷﺪه اﺳﺖ.
در ﺣﺎﻟﻲ ﻛﻪ در ﻳﻚ ﺳﻴﻢ ﺑﻨﺪی ﻣﻮﺟﻲ، دو ﺳﺮ ﻳﻚ ﻛﻼف ﺑﻪ دو ﻗﻄﻌﻪ ﻛﻤﻮﺗﺎﺗﻮر ﻛﻪ از ﻫﻢ ﺑﻪ اﻧﺪازه دو ﮔﺎم ﻗﻄﺒﻲ ﻓﺎﺻﻠﻪ دارﻧﺪ، ﻣﺘﺼﻞ ﻣﻲ ﮔﺮدد ﺳﭙﺲ ﻳﻚ آرﻣﻴﭽﺮ ﺑﺎ سیم بندی موجی. یک ماشین P قطبی بین دو کموتاتور مجاور هم P/2 کلاف سری با هم خواهد داشت.
سیم بندی حلقوی در موتور DC
اﮔﺮ وﻟﺘﺎژ ﻫﺎی اﻟﻘﺎﻳﻲ دو ﺑﺎزوی ﻛﻼف ﺑﺎ ﻫﻢ ﺟﻤﻊ ﺷﻮﻧﺪ ﻻزم اﺳﺖ ﻛﻪ بازوهای کلاف، زﻳﺮ دو ﻗﻄﺐ ﻏﻴﺮﻫﻤﻨﺎم ﻗﺮار ﮔﻴﺮﻧﺪ. ﻋﻼوه ﺑﺮ آن ﺑﺮای ﻳﻚ ﺷﻜﻞ ﺑﻮدن اﻧﺪازه ﻛﻼف ها باید تعداد شیارهای بین دو بازوی کلاف (گام کلاف Ys)، عدد صحیح کمتر یا مساوی با تعداد شیارهای S تقسیم بر تعداد قطب ها باشد.
در سیم پیچ حلقوی انتهای یک سیم پیچ به یک بخش کموتاتور و شروع کویل بعدی که در همان قطب قرار دارد متصل شده و به همان بخش کموتاتور متصل می شود.
مطابق شکل انتهای کویل ۱ و انتهای شروع کویل ۲ هر دو به یک بخش کموتاتور -۲ متصل شده اند و هر دو سیم پیچ در زیر قطب مغناطیسی مشابه قرار دارند که در اینجا قطب N است.

سیم پیچ حلقوی بر دو نوع است:
سیم پیچ حلقوی ساده: در این حالت تعداد مسیر موازی بین جاروبک ها برابر با تعداد قطب هاست.

سیم پیچی حلقوی دوبل: در این حالت تعداد مسیر موازی بین جاروبک ها دو برابر تعداد قطب ها است.
 سیم بندی موجی در موتور DC
سیم بندی موجی در موتور DC
ﭼﻮن ﺗﻮزﻳﻊ ﻣﻴﺪان در ﻓﺎﺻﻠﻪ ﻫﻮاﻳﻲ ﻣﺎﺷﻴﻦ ﻫﺎﻳﻲ ﻛﻪ ﺑﻴﺶ از دو ﻗﻄﺐ دارﻧﺪ، ﺑﻌﺪ از ﻫﺮ زوج ﻗﻄﺐ ﺗﻜﺮار ﻣﻲ ﺷﻮد، ﺑﻪ ﺟﺎی اﺗﺼﺎل دو ﺑﺎزوی ﻳﻚ ﻛﻼف ﺑﻪ دو ﻗﻄﻌﻪ ﻛﻤﻮﺗﺎﺗﻮر ﻣﺠﺎور ﻫﻢ (در ﺳﻴﻢ ﺑﻨﺪی ﺣﻠﻘﻮی) می توان آﻧﻬﺎ را ﺑﻪ دو ﻗﻄﻌﻪ ﻛﻤﻮﺗﺎﺗﻮر ﻛﻪ از ﻫﻢ ﺑﻪ اﻧﺪازۀ ﻳک زوج ﻗﻄﺐ ﻓﺎﺻﻠﻪ دارﻧﺪ ﻣﺘﺼﻞ ﻛﺮد.
در اﻳﻦ ﺻﻮرت وﻟﺘﺎژ ﺑﻴﻦ دو ﻗﻄﻌﻪ ﻛﻤﻮﺗﺎﺗﻮر ﻣﺠﺎور فرقی ﺑﺎ ﺣﺎﻟﺖ ﺳﻴﻢ ﺑﻨﺪی ﺣﻠﻘﻮی ﻧﺨﻮاﻫﺪ داﺷﺖ ﺑﺎ ﮔﺮدش ﺣﻮل آرمیچر، کلاف های زیر قطب های یکسان را، می توان با هم سری کرده تا ولتاژ القایی آنها با هم جمع گردند. بنابراین بر خلاف سیم بندی حلقوی، سیم بندی ماشین از اتصال سری کلاف های دور از هم و با چندین بار گردش حول آرمیچر، تشکیل می گردد. این نوع سیم بندی از دید اتصال های انتهایی، سیم بندی موجی نامیده می شود.

طبقه بندی ماشین های DC
مدار تحریک و مدار آرمیچر را می توان به طرق گوناگون به یکدیگر مرتبط ساخت تا مشخصات عملیاتی مختلف پدید آید. این امر از مشخصات بارز ماشین های DC است. شکل زیر، اتصالات معمول سیم بندی میدان را نشان می دهد. در قسمت (الف) جریان میدان توسط منبعی خارجی که مستقل از Va است تأمین می شود. در قسمت (ب) جریان مدار موازی تابعی از Va و در قسمت (ج) جریان مدار سری تابعی از Ia است. در مدارهای تحریک کمپوند قسمت (د) میدان نتیجه، تابعی از Va و Ia است.
در تحریک کمپوند، در صورتی که mmf میدان سری به میدان اصلی ناشی از تحریک موازی اضافه گردد، کمپوند اضافی و در صورتی که mmf میدان سری با میدان موازی مخالفت کند، کمپوند تفاضلی را خواهیم داشت، مشخصه های ولتاژ – جریان بار در حالت ژنراتوری و گشتاور – سرعت در حالت موتوری به نحوه اتصال سیم بندی های میدان بستگی کامل دارد.
مدار تحریک جداگانه موتور DC

موتور DC شنت
- گشتاور راه اندازی متوسط
- سرعت نسبتاً ثابت
- سرعت قابل کنترل
- تنظیم خودکار
- در مواردی که سرعت نسبتاً ثابتی لازم باشد از این نوع موتور استفاده می شود.

معادلات جریان ، ولتاژ و توان یک موتور شنت به شرح زیر نوشته می شود:
![]()

![]()
توان ورودی برابر است با:


موتور DC سری
- گشتاور راه اندازی زیاد
- در این حالت سرعت با بار تغییر می کند.
- در مواردی که بار همیشه ثابت است ولی در محدوده وسیعی تغییر می کند، از این نوع موتور استفاده می شود.

با اعمال KCL در مدار موتور DC سری خواهیم داشت:

معادله ولتاژ با استفاده از KVL در شکل بالا به دست می آید:
![]()

![]()
![]()
موتور DC کمپوند یا ترکیبی
این موتور موتور ترکیبی به دو دسته موتور ترکیبی اضافی و موتور ترکیبی تفاضلی تقسیم می شود.
علامت مثبت و منفی نشانگر جهت شار تولید شده در سیم پیچهای میدان است.

موتور DC کمپوند اضافی
در این موتور شار تولید شده توسط هر دو سیم پیچ در یک جهت است:
![]()
-
ویژگی های موتور ترکیبی (کمپوند) اضافی
گشتاور راه اندازی عالی
خصوصیت سرعت ثابت در این نوع موتور بهتر از موتورهای شنت (موازی) است.
-
موتور DC کمپوند تفاضلی
در این موتور، شار تولید شده توسط سیم پیچ های میدان سری مخالف شار تولید شده توسط سیم پیچ میدان shunt است:
![]()
-
ویژگی های موتور DC ترکیبی (کمپوند) تفاضلی
گشتاور راه اندازی بسیار ضعیف
سرعت کاملاً ثابت در محدوده کوچک
کاربرد بسیار کمی دارد. زیرا نظیر این خصوصیات این موتور و حتی بهتر از آن را می توان در موتور AC یافت.
کنترل دور موتور DC
موتورهای DC دارای قابلیت انعطاف بسیار بوده و در صنایع کاربرد وسیعی دارند. با اتصالات مختلف سیم پیچ میدان می توان در این ماشین ها به مشخصه های گوناگون گشتاور، سرعت و ولتاژ جریان دست یافت. موتورهای DC به دلیل امکان سرعت بالای خود کاربرد وسیعی در صنایع دارند. امروزه هنوز موتورهای DC در سیستم های حمل و نقل (مترو) حرف اول را می زنند. موتورهای DC کوچک در سیستم های کنترل به وفور یافت می شوند که یکی از آن ها کنترل دور موتور DC است.
از عمده کاربردهای کنترل کننده دور و گشتاور موتور الکتریکی، انتقال انرژی از منبع آن به فرایند تحت کنترل است. درایوهای DC، سیستم های کنترل سرعت برای موتورهای DC هستند. در موتورهای DC، سرعت موتور با ولتاژ محرک رابطۀ مستقیم و با شار موتور (که یک تابع جریان میدان است) رابطۀ معکوس دارد. اما می توان از هر دو ولتاژ یا جریان میدان برای کنترل سرعت استفاده کرد.

عوامل موثر در سرعت موتور DC
سرعت موتور DC بستگی به یک سری موارد دارد که عبارتند از:
– ولتاژ و جریان عبوری از سیم پیچ موتور
– بار موتور
– گشتاور موتور
کنترل دور موتور DC شنت با مقاومت آرمیچر

مدار کنترل دور موتور DC شنت از طریق کنترل مقاومت آرمیچر در شکل زیر نشان داده شده است. در این روش یک مقاومت متغیر Re در مدار آرمیچر قرار می گیرد. تغییر در مقاومت متغیر بر شار تأثیر نمی گذارد زیرا میدان به طور مستقیم به تغذیه اصلی متصل است.
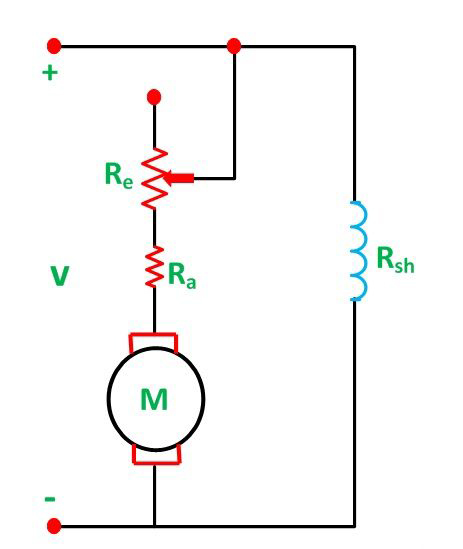
نمودار مشخصه سرعت – جریان موتور شنت DC در این حالت، در شکل زیر نمایش داده شده است.

کنترل دور موتور DC سری با مقاومت آرمیچر

حال مدار کنترل سرعت موتور DC سری را با استفاده از روش کنترل مقاومت آرمیچر در نظر می گیریم.
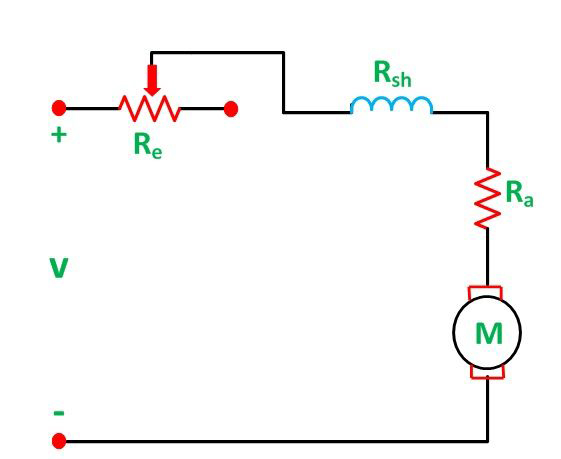
با تغییر مقاومت مدار آرمیچر، جریان و شار هر دو تحت تأثیر قرار می گیرند.
افت ولتاژ در مقاومت متغیر باعث کاهش ولتاژ آرمیچر می شود و در نتیجه سرعت موتور کاهش می یابد.
نمودار مشخصه سرعت – جریان موتور DC سری در این حالت در شکل زیر نمایش داده شده است.
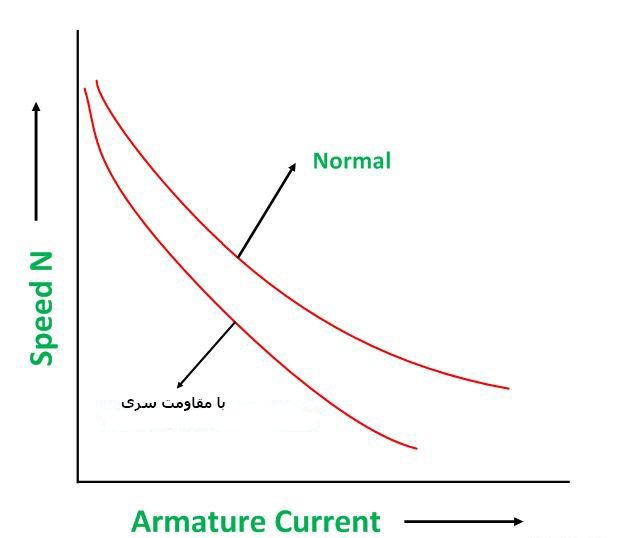
هنگامی که مقدار مقاومت متغیر Re افزایش یابد، موتور با سرعت کمتری کار می کند.
-
معایب کنترل دور موتور DC به روش کنترل مقاومت آرمیچر
مقدار زیادی از توان در مقاومت خارجی Re اتلاف می شود.
کنترل مقاومت آرمیچر، به گونه ای محدود می شود که سرعت را از سرعت معمول موتور پایین تر نگه داشته و افزایش سرعت بالاتر از حد نرمال از این طریق امکان پذیر نیست.
برای مقدار معین مقاومت متغیر، کاهش سرعت ثابت نیست بلکه با بار موتور تغییر می کند.
این روش کنترل سرعت موتور تنها برای موتورهای کوچک استفاده می شود.
کنترل دور موتور DC به وسیله کنترل شار میدان
 کنترل دور موتور DC به وسیله کنترل شار میدان
کنترل دور موتور DC به وسیله کنترل شار میدانشار از طریق جریان میدان تولید می شود. بنابراین کنترل سرعت موتور (کنترل دور موتور DC) از طریق کنترل جریان میدان قابل دستیابی است.
در موتور DC شنت مقاومت متغیر Rc به صورت سری به سیم پیچ های میدان مطابق شکل متصل می شود.

جریان شنت در این حالت از رابطه زیر به دست می آید:
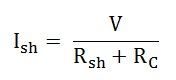
اتصال مقاومت Rc باعث کاهش جریان میدان می شود و از این رو شار نیز کاهش می یابد. این کاهش شار، سرعت را افزایش می دهد و بدین ترتیب موتور با سرعتی بالاتر از سرعت نرمال کار می کند. بنابراین از این روش برای سرعت دادن به موتور به میزان بالاتر از نرمال و یا اصلاح افت سرعت به دلیل بار استفاده می شود.
نمودار مشخصه سرعت – گشتاور برای موتور DC شنت در شکل زیر نمایش داده شده است:
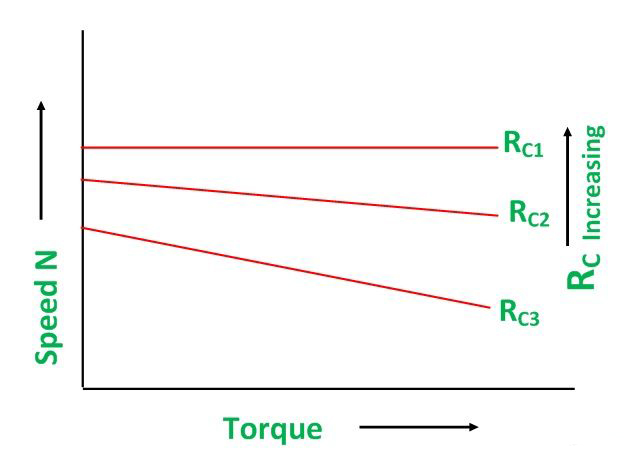
کنترل موتور DC سری از طریق کنترل شار میدان

در موتور DC سری تغییر در جریان میدان با روش های مختلف مانند استفاده از دایورتر و یا روش کنترل میدان ضربه ای (Tapped field control) صورت می گیرد.
کنترل موتور DC سری با استفاده از دایورتر
یک مقاومت متغیر Rd به موازات سیم پیچ های سری مطابق شکل قرار می گیرد.
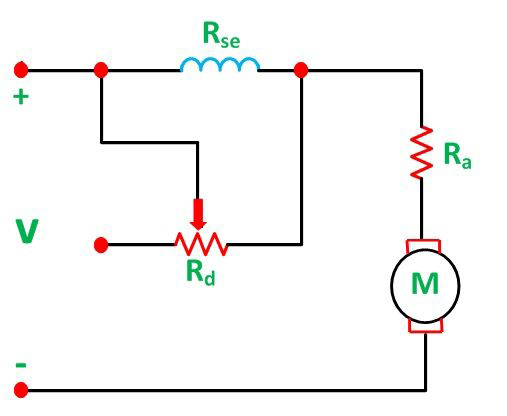
به این مقاومت موازی Diverter گفته می شود. بخشی از جریان اصلی از طریق مقاومت متغیر Rd منحرف می شود. بنابراین عملکرد یک دایورتر کاهش جریان از طریق سیم پیچ میدان است. کاهش جریان میدان باعث کاهش مقدار شار و در نتیجه افزایش سرعت موتور می شود.
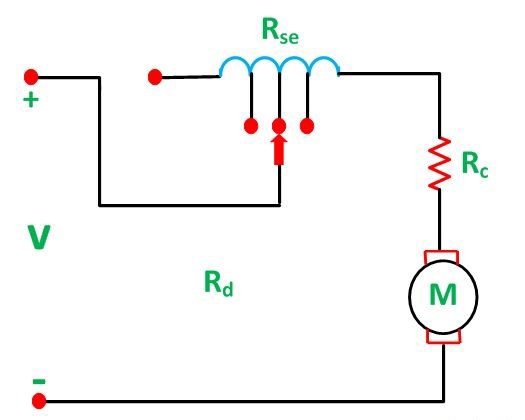
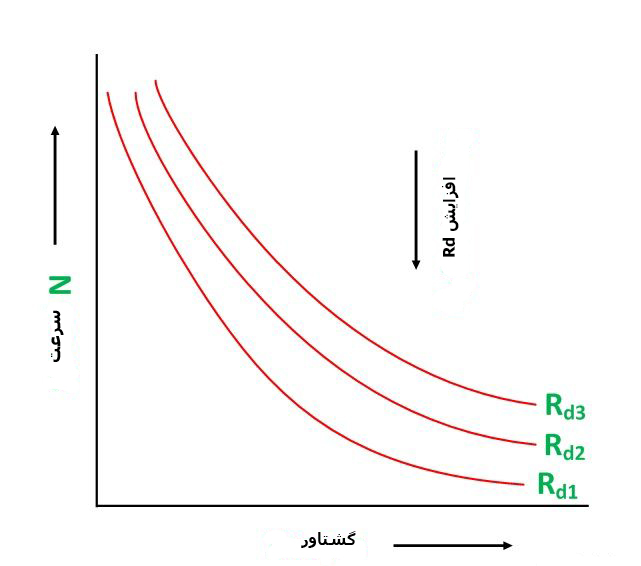
روش کنترل میدان ضربه ای
جریان موتور با تغییر شار میدان تغییر می کند. نمودار مشخصه سرعت – گشتاور در این حالت در شکل زیر نمایش داده شده است.
-
مزایای کنترل دور موتور DC از طریق کنترل شار میدان
این روش آسان و راحت است. از آن جا که میدان شنت خیلی کوچک است. اتلاف توان نیز در میدان شنت معمولاً کوچک است. شار معمولاً نمی تواند فراتر از مقدار نرمال افزایش یابد، بنابراین کنترل سرعت به وسیله شار محدود به تضعیف میدان باعث افزایش سرعت می شود. این روش تنها در رنج محدودی اعمال می شود. زیرا اگر میدان خیلی زیاد تضعیف شود (کاهش یابد)، پایداری از بین می رود.
 روش کنترل دور موتور DC به وسیله PWM
روش کنترل دور موتور DC به وسیله PWM
ساده ترین راه برای کنترل سرعت موتور DC استفاده از مقاومت متغیر یا رئوستا است. اما یکی از پرکاربردترین روش ها بر کنترل دور موتور DC، استفاده از مدولاسیون عرض پالس است. در این روش که به اختصار PWM نیز نامیده می شود، یک روش مؤثر در کنترل توان است که در آن مقدار توان اعمالی به بار به دوره کاری سیکل وظیفه یا Duty cycle بستگی دارد.
در روش کنترل موتور به وسیلۀ PWM، یک فرکانس مناسب و ثابت را انتخاب کرده و در صورتی که نیاز به افزایش سرعت موتور باشد، دوره کاری یا همان Duty cycle را افزایش و در صورتی که نیاز به کاهش سرعت موتور باشد دوره کاری را کاهش می دهیم. گفتنی است دوره کاری یا سیکل وظیفه در موتورهای الکتریکی معمولا کمتر از ۱۰۰% است.
کنترل دور موتور DC با درایو
 کنترل دور موتور DC با درایو
کنترل دور موتور DC با درایوکنترل دور موتور DC از طریق درایور مخصوص موتور DC صورت می گیرد. از عوامل مؤثر در انتخاب درایور DC مناسب، رنج ولتاژ درایور DC، جریان نامی و لحظه ای است.
بیشتر بخوانید:
- پلاک خوانی الکتروموتور سه فاز
- کاربرد موتور سنکرون
- بررسی صفر تا صد الکتروموتور دالاندر
- اساس کار موتور الکتریکی
- بررسی و مقایسه انواع موتور الکتریکی
- راه اندازی ستاره-مثلث موتور سه فاز
![]() در صورتی که سوالی در خصوص مطالب بیان شده دارید می توانید در قسمت نظرات از ما بپرسید یا با ارائه پیشنهادات خود، ما را در بالا بردن کیفیت مقالات یاری کنید.
در صورتی که سوالی در خصوص مطالب بیان شده دارید می توانید در قسمت نظرات از ما بپرسید یا با ارائه پیشنهادات خود، ما را در بالا بردن کیفیت مقالات یاری کنید.
سوالات متداول
کموتاتور چیست؟
کموتاتور قطعه ای رسانا و به صورت حلقه استوانه ای دارای شکاف است که به آرمیچر متصل می شود؛ در واقع هر قسمت از حلقه به انتهای هر یک از سیم پیچ های آرمیچر متصل می شود. کموتاتور وظیفه سوئیچینگ جریان در سیم پیچی آرمیچر به منظور ایجاد گشتاور را بر عهده دارد. دو ﺳﺮ ﻛﻼف ﻫﺎ ﺑﻪ ﻗﻄﻌﺎت ﻣﺴﻲ ﻛﻤﻮﺗﺎﺗﻮر ﻟﺤﻴﻢ ﻣﻲ ﺷﻮﻧﺪ. ﻗﻄﻌﺎت ﻛﻤﻮﺗﺎﺗﻮر ﻛﻪ از ﻫﻤﺪﻳﮕﺮ و از ﺷﻔﺖ ﻋﺎﻳﻖ ﺷﺪه اﻧﺪ ﺳﻄﺢ ﺧﺎرﺟﻲ آن ها اﺳﺘﻮاﻧﻪ ای ﺷﻜﻞ است ﻛﻪ ﺟﺎروﺑﻚ ﻫﺎ ﺑﺮ روی آن ﺣﺮﻛﺖ ﻣﻲ ﻛﻨﻨﺪ. ﻣﺠﻤﻮﻋﻪ ﺟﺎروﺑﻚ ﻫﺎ و ﻛﻤﻮﺗﺎﺗﻮر ﻧﻪ ﺗﻨﻬﺎ ﺑﻪ ﻣﻨﺰﻟﻪ اﺗﺼﺎل ﮔﺮدان ﺑﻴﻦ دو ﺳﺮ ﻛﻼف ﻫﺎ ﺑﺎ ﭘﺎﻳﺎﻧﻪ ﻫﺎی ﻣﺎﺷﻴﻦ ﻋﻤﻞ ﻣﻲ ﻛﻨﻨﺪ ﺑﻠﻜﻪ ﺳﺒﺐ ﻣﻲ ﺷﻮﻧﺪ ﺑﺎ اﻳﻨﻜﻪ وﻟﺘﺎژ اﻟﻘﺎﻳﻲ در ﻛﻼف ﻫﺎ ﻣﺘﻨﺎوب است، ﺟﺮﻳﺎن در ﻣﺪار ﺧﺎرﺟﻲ ﻳﻚ ﺟﻬﺖ ﺑﺎﺷﺪ. ﺟﺎروبک ﻫﺎ ﻣﻌﻤﻮﻻ در ﻣﻮﻗﻌﻴﺖ ﺧﻨﺜﻲ ﺟﺎی ﻣﻲ ﮔﻴﺮﻧﺪ، ﻳﻌﻨﻲ ﺑﻪ ﻛﻼف ﻫﺎﻳﻲ ﻛﻪ وﻟﺘﺎژ اﻟﻘﺎﻳﻲ در آﻧﻬﺎ ﺻﻔﺮ است متصل می شوند.
کنترل دور موتور DC به وسیله PWM چطور انجام می شود؟
ساده ترین راه برای کنترل سرعت موتور DC استفاده از مقاومت متغیر یا رئوستا است. اما یکی از پرکاربردترین روش ها بر کنترل دور موتور DC، استفاده از مدولاسیون عرض پالس است. در این روش که به اختصار PWM نیز نامیده می شود، یک روش مؤثر در کنترل توان است که در آن مقدار توان اعمالی به بار به دوره کاری سیکل وظیفه یا Duty cycle بستگی دارد. در روش کنترل موتور به وسیلۀ PWM، یک فرکانس مناسب و ثابت را انتخاب کرده و در صورتی که نیاز به افزایش سرعت موتور باشد، دوره کاری یا همان Duty cycle را افزایش و در صورتی که نیاز به کاهش سرعت موتور باشد دوره کاری را کاهش می دهیم. گفتنی است دوره کاری یا سیکل وظیفه در موتورهای الکتریکی معمولا کمتر از ۱۰۰% است.

سلام خسته نباشید
ببخشید یک.مقاله برای
انواع کنترل سرعت مولدهای جریان مستقیم
میخواستم،ازکجامیتونم تهیه کنم
لطفا سریع پاسخ بدین سپاس!🌹
با سلام
من میخواستم با استفاده ازآرمیچر در اثر حرکت چرخ دوچرخه باطری موبایل رو شارژ کنم
میخوام بدونم دور چرخش چه اثری در ولتاژ و آمپراژ خروجی (تولید شده) داره
و چگونه میتوان برق تولیدی رو متناسب با دستگاه کرد؟
سلام
من محصولی را اختراع کرده ام که یک قطعه واحد است ، یعنی با نوع دیگری مرتبط نیست ،.
این محصول با وجود داشتن یک خروجی وث یک ورودی ، بصورت همزمان ، سه نوع کار مختلف را انجام میدهد ،.
همانطور که میدانیم برای روشن کردن چراغهای ال ای دی , به کمک برق شهر ، نیاز به یک کاهنده ولتاژ و یک مبدل Dc داریم
اما با وجود تکنیک جدید ، ما دو گام جلوتریم ،.
زیرا علاوه بر اینکه این دو عمل را فقط به کمک یک قطعه ، انجام میدهیم ،.
عملکرد سومی هم وجود دارد که با استناد به ویدئوی مربوطه ،غیر قابل انکار است و آن اینست که ،. شاخصهای مثبت و منفی جریان Dc را ، بی اثر میکند و مانند چراغهای Ac روشن میشوند ،
در هر دو جهت ،.
چه مثبت به مثبت و منفی در منفی
و چه مثبت به منفی و منفی به مثبت ،.
بنظر شما این مطلب چه تاثیری در صنعت خواهد داشت ،.؟؟
مضاف بر اینکه در تولید لامپهای ال ای دی ،. دیگر نیاز به برد نیست .
سلام
من یه موتور DC دارم که ۱۲ ولت هست میخوام برای ساخت دریل ازش استفاده کنم که جریان ۲ آمپر به بالا میخواد میخواستم بدونم چه طوری سرعتش را کنترل کنم بدون اینکه قدرت موتور کم بشه و نتونه سوراخ کاری کنه ممنون میشم جواب بدین
با سلام.این درایورها را از کجا میشه تهیه کرد؟ و قیمت آن چقدر هست؟
سلام وقت بخیر. برای استعلام قیمت و خرید درایو لطفا با این شماره بخش فروش در تماس باشید
03132664550
09120865970
من یک موتور تردمیل دو اسب دارم. ظاهرا دی سی هست. میخوام یک مخلوط کن باهاش درست کنم.
آیا میشه از دیمر برای کنترل دور استفاده کرد؟
لطفا راهنمایی کنید.
با تشکر
سلام
درایور درایور های مربوط به این موتور در بازار موجوده که می تونین تهیه کنید. دیمری که استفاده می کنید بايد dc باشه ولي موتور شما صدمه ميبينه چون جریان کافی رو هدایت نمیکنه . اصولا دیمر برای کنترل موتور های شفت آزاد مثل پنکه استفاده می شه.
بله میشه ولی برای مخلوط کن این همه قدرت نیاز نیست
ایا با چند اینورتر میتوان چند موتور الکتریکی را به صورت سنکرون تغییر دور یا گشتاور داد
یعنی فرکانس های مختلف موتورها ویا اینورترها که کنار هم هستند برای یکدیگر خصوصا در توان های بالا ایجاد نویز واختلال نمیکنند؟
بله می شود و اگه مدارات الکترونیکی در کنارشان نباشد، فیلتر هارمونیک داخلی کفایت می کند؛ ولی اگر مدارات الکترونیکی در کنار آن ها باشد، باید فیلتر هارمونیک در ورودی درایو گذاشت .